lectures
GPS测量设计与实践
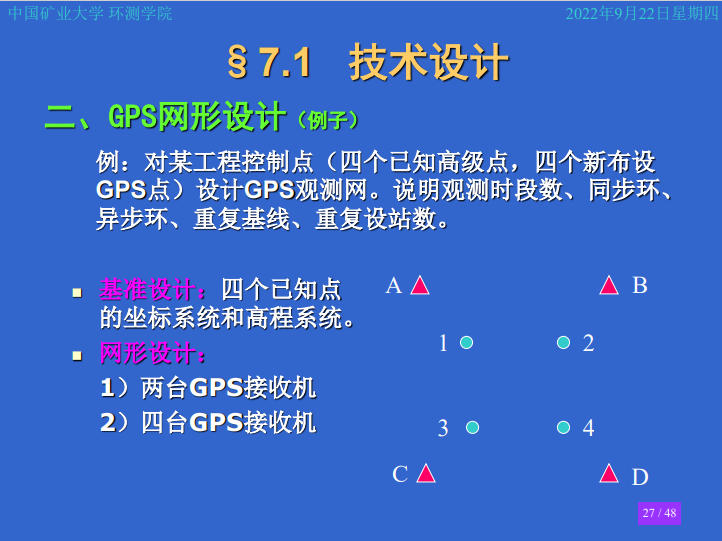
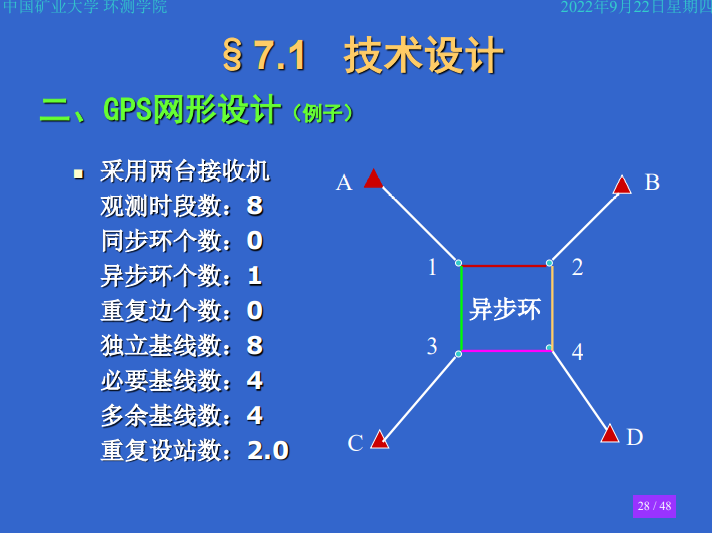
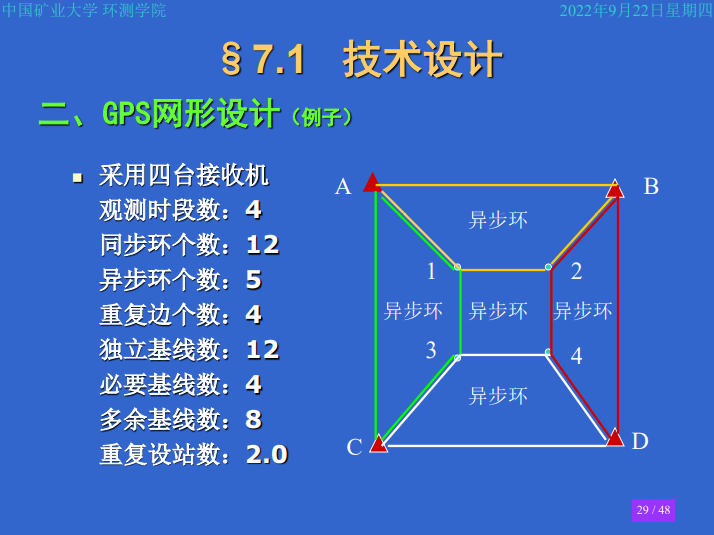
GPS 网形设计
观测时段:开始接收卫星信号到观测停止,连续工作的时间段。
同步观测:两台或两台以上接收机同时观测对同一组卫星进行的观测。
同步观测环:三台以上接收机同步对同一组卫星进行的观测。
异步观测环:含有非同步观测的基线向量闭合环。
独立观测环:非同步观测所形成的基线向量闭合环,独立环。
必要基线:n个测点所形成的独立基线向量,n-1条。
独立基线:N台接收机同步观测所获得的独立基线,N-1条。
多余基线:除必要基线外的其他独立基线,独立基线与必要基线数之差。
非独立基线:除独立基线以外的其他基线,基线总数与独立基线数之差。
理论上,同步闭合环闭合差应为零。但是,由于不同接收机的观测并不能严格同步观测等观测缺陷,导致同步换闭合差并不为零。若同步换闭合差不查过限差,表明观测无严重失误和基线向量解算合格,但不能说明观测精度高(为什么);若同步换闭合差较大,表明观测或基线向量解算有严重失误。
为确观测成果的可靠性和有效地发现观测值中存在的粗差(天线高、信号干扰等),必须使GPS网中的独立边构成一定的几何图形。这种几何图形可以是由数条独立边构成的异步环,也可以使由两个起算点之间的数条独立边构成的附和路线。
网点数:n
每点设站次数:m
接收机数:N
时段数:
\(C=n \cdot m/N\)
总基线数:
\(J_总=C \cdot N \cdot (N-1)/2\)
必要基线数:
\(J_必=n-1\)
独立基线数:
\(J_独=C \cdot (N-1)\)
多余基线数:
\(J_多=C \cdot (N-1)-(n-1)\)
\(J_多=J_独-J_必\)
最简同步换个数(单时段):
\(T=J_总-J_独(N-1)\)
例如:n=4,m=3,N=3时
C=43/3=4
J总=43(3-1)/2=12
J必=4-1=3
J独=4(3-1)=8
J多=4*(3-1)-(4-1)